Overview: KySat-3 is a re-fly mission of KySat-2. Featuring hardware and software entirely designed, built, and tested by students of the University of Kentucky. Development of the satellite began in 2011, shortly after the launch of KySat-1. KySat-3 features a 5 megapixel digital camera, a temperature sensor, a 3-axis MEMS rate gyroscope, a 3-axis magnetometer, and a “stellar gyroscope” which was developed by University of Kentucky students. Once in orbit, the satellite will use RF signals to communicate with the ground station, receiving commands and transmitting data and photos. The main distinguishing factor between KySat-3 and KySat-2 is the Electronic Power Supply (EPS) board. KySat-3 features a new EPS, which was designed by a University of Kentucky graduate student.
Launch Information: Manifested on the Orbital Sciences Commercial Resupply Mission Flight 7 and sitting atop an United Launch Alliance Atlas V rocket, KySat-3 started its journey towards the International Space Station on April 18, 2017.
Dubbed the S.S. John Glenn, this Cygnus spacecraft carried more than 7,600 pounds of science experiments and crew supplies to space.
On April 22nd, Thomas Pesquet and Peggy Whitson, aboard the International Space Station, successfully grappled and berthed Cygnus to the Unity module of the ISS.
Mission Objectives: The primary objective of KySat-3 is proof of concept. Using lessons learned from KySat-1, SSL has spent the past two years designing, revising, and optimizing KySat-2. KySat-2 will demonstrate key technologies developed by University of Kentucky and Morehead University students. These include a distributed network computing architecture, power and radio systems, and a “stellar gyroscope” for attitude determination. If successful, KySat-2 will serve as a standard on which to base future satellites built by the lab.
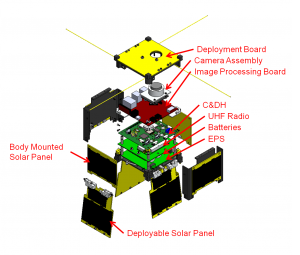
Sub-Systems:
- Image Processing Unit (IPU)
- Command and Data Handling (C&DH)
- UHF Radio
- Sensors
- Electric Power System (EPS)
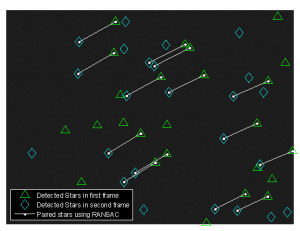
Stellar Gyroscope: KySat-2 will demonstrate the stellar gyroscope concept in orbit. It is a visual attitude propagation approach being researched at the University of Kentucky. The concept lies in tracking the motion of features in the camera’s view (such as stars) to estimate the changes in the satellite’s orientation. Similar to how an optical mouse observes a mouse pad to keep track of it’s position, the stellar gyroscope tracks the rotational changes of the satellite in 3 degrees of freedom. On KySat-2, the digital signal processing capabilities of the on-board IPU will be utilized to acquire and process star field images to demonstrate this technology. Visual attitude propagation addresses attitude determination challenges associated with satellite miniaturization, and in turn increasing the utility of miniature spacecraft, such as CubeSats. Several publications and a PhD dissertation are available on this research.
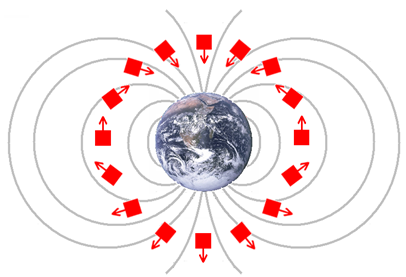
Passive Magnetic Stabilization: KySat-2 is equipped with a passive attitude control scheme known as Passive Magnetic Stabilization. This passive control technique uses permanent magnets and magnetic hysteresis material fixed to the chassis of KySat-2. The permanent magnets will provide torque in attempts to align with Earth’s magnetic field (in the same fashion that a magnetic compass needle points to magnetic North). The permanent magnets will be mounted to the spacecraft’s chassis in such a way that when aligned with Earth’s magnetic field, KySat-2’s camera will point at Earth while over Northern Hemisphere, and out into space while over the Southern Hemisphere.
Permanent magnets provide the small amount of torque needed to keep the spacecraft oriented correctly, but in the vacuum of space, there is no damping effect (such as air resistance as we have on the surface). Because of this, KySat-2 would oscillate around it’s targeted orientation rather than settle into it smoothly. Also, permanent magnets can only provide control over two axes while the third axis is uncontrolled and free to rotate. To alleviate these problems, KySat-2 is also equipped with hysteresis (memory) material. This material “memorizes” the current magnetic field and thus resists changes in KySat-2’s orientation. This effect is small, and much less assertive than the permanent magnets, but it provides the needed damping effect to stabilize KySat-2 on the two control axes, and resist changes on the uncontrolled axis as well.
Launch: KySat2 launched with NASA’s Educational Launch of Nanosatellites (ELaNa) program on the ELaNa IV mission. The launch took place out of Wallops Island, VA on November 19, 2013.
For more information on the ELaNa program, visit http://www.nasa.gov/mission_pages/smallsats/elana'

Map of launch location.